
Ostatnio dodane
Więcej...








Kategorie
Dostawcy
Gwarancja
Wszystkie zakupy na Nettigo są chronione 14-sto dniowym prawem do zwrotu. Bez zbędnych pytań.
Szczegółowe informacje o dostawie i zwrotachNewsletter
Raz, góra dwa razy w miesiącu możesz otrzymać newsletter o nowościach w naszej ofercie, promocjach, a także porcję wiadomości ze świata DIY i Arduino.
ADAPTER ŻYROSKOPU/AKCELEROMETRU 3 OSIOWEGO MPU-6050
Kod:
MOD-328
Waga:

2
g
Dostawca:
Jest to płytka z gotowym i łatwym do uruchomienia układem MPU-6050. Układ MPU-6050 to scalony czujnik położenia względem Ziemi. Zawiera w sobie 3-osiowy akcelerometr i 3-osiowy żyroskop zapewniające szybki i stabilny pomiar położenia. Dodatkowo posiada koprocesor DMP (Digital Motion Processor) do przeliczania danych z czujników na położenie.
Produkt wycofany ze sprzedaży
Jest to płytka z gotowym i łatwym do uruchomienia układem MPU-6050. Układ MPU-6050 to scalony czujnik położenia względem Ziemi. Zawiera w sobie 3-osiowy akcelerometr i 3-osiowy żyroskop zapewniające szybki i stabilny pomiar położenia.
Układ zawiera też w sobie specjalizowaną jednostke DMP (Digital Motion Processor) umożliwiającą sprzętowe przeliczanie danych z czujników na położenie urządzenia względem Ziemi.
MPU-6050 komunikuje się z mikrokontrolerem za pomocą magistrali i2c (TWI)
W celu poprawy jakości pomiarów układ umożliwia podłączenie magnetometru (kompasu elektronicznego), za pomocą dodatkowej magistrali i2c (TWI).
Parametry techniczne:
- Wymiary: W mm H mm
- Waga: XXX g
- Zasilanie: od 2.375 do 3.46 V
- Pobór prądu przez żyroskop: 3.6 mA
- Pobór prądu przez akcelerometr: 500 uA
- Pobór prądu przez MPU: 250 uA
- Standard stanów logicznych: Zależny od zasilania 2.4 lub 3.3 V
- Komunikacja: Magistrala I2C (TWI) 400 kHz
- Zakres pomiarowy żyroskopu: +/-250, +/-500, +/-1000, +/-2000 stopni/sekundę
- Zakres pomiarowy akcelerometru: +/-2 g, +/-4 g. +/- 8 g, +/-16 g
- Rozdzielczość: 16 bitowa dla każdej osi każdego czujnika
- Szybkość pomiaru żyroskopu: od 4 do 8000 Hz
- Szybkość pomiaru akcelerometru: od 4 do 1000 Hz
- Szybkość pomiaru MPU: od 5 do 200 Hz
- Istnieje możliwość zastosowania bufora z 1024 ostatnimi wynikami
- Programowalne wyjście przerwań informujące o poruszeniu urządzenia lub dokonaniu pomiaru
- Dokumentcja: Dokumentacja układu mpu-6050, Schemat płytki
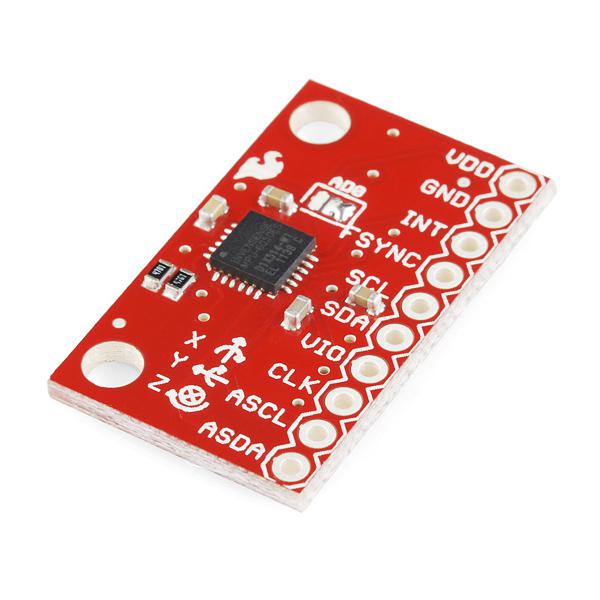
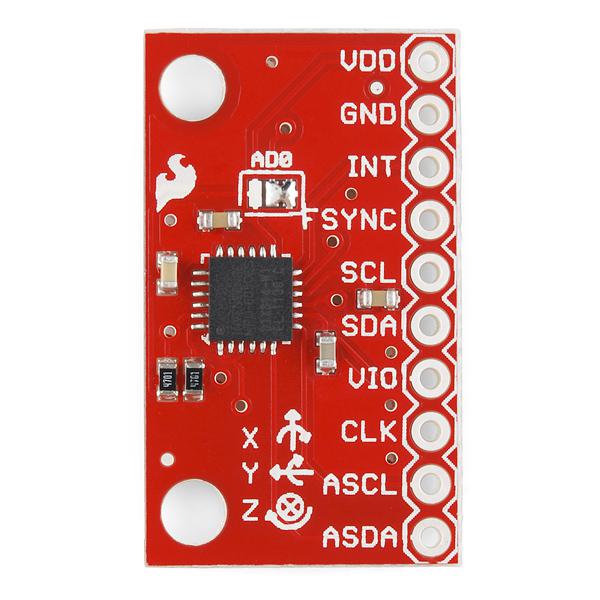
Opis wyprowadzeń:
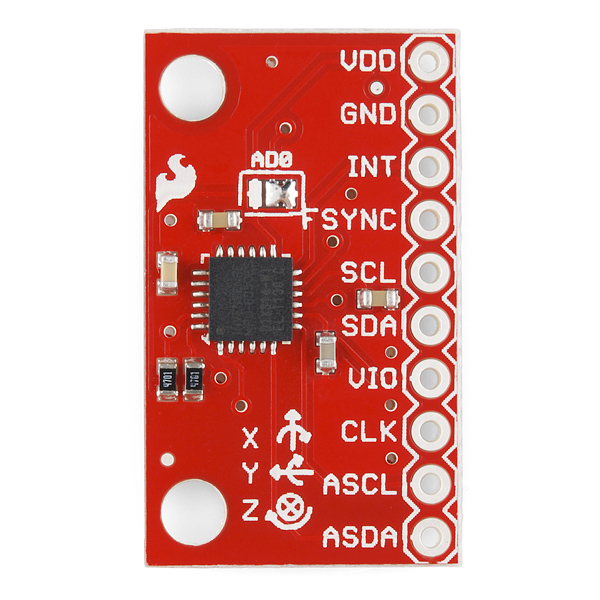
- VDD - Zasilanie 2,4 lub 3,3 V
- GND - Masa zasilania
- INT - Wyjście przerwania (typu otwarty dren)
- FSYNC - Wejście synchronizacji wymuszające pomiar z czujników
- SCL - Wejście sygnału zegarowego magistrali i2c
- SDA - Sygnał danych magistrali i2c
- VIO - Wejście napięcia ustalającego standard stanów logicznych
- CLK - Wejście systemowego zegara układu
- ASCL - Wyjście sygnału zegarowego magistrali i2c do magnetometru
- ASDA - Sygnał danych magistrali i2c do magnetometru
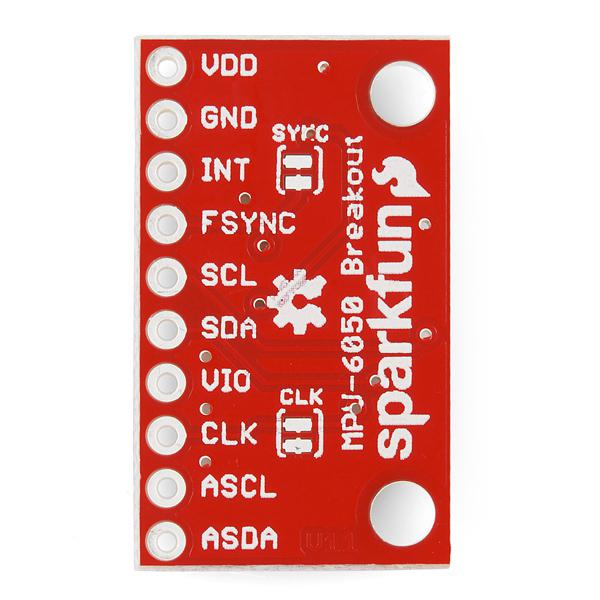
Opis zworek:
- AD0 - Wybiera adres układu na magistrali i2c (domyślnie podłączony do GND czyli adres 0x68. Po przełączeniu zworki na Vcc, uzysujesz adres 0x69)
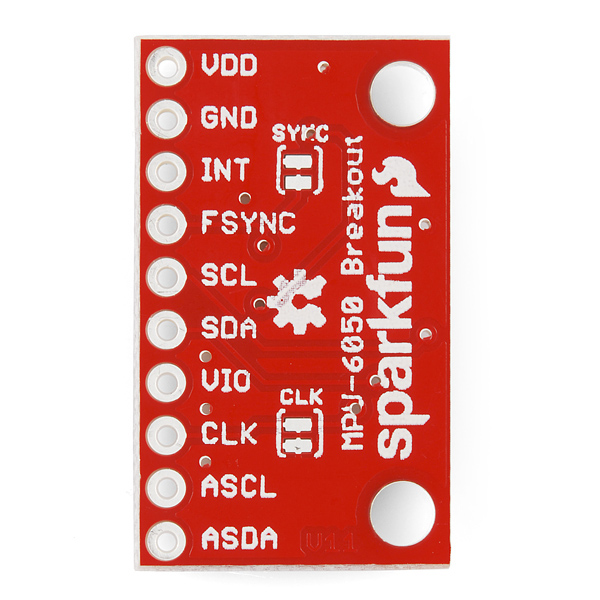
- SYNC - Ustala, czy układ będzie używał wejścia synchronizacji FSYNC (domyślnie podłączony do GND czyli wejście nieużywane)
- CLK - Ustala czy będzie używany zewnętrzy sygnał zegarowy CLK (domyślnie podłączony do GND czyli wejście nieużywane)
Podłączenie do Arduino:
- Arduino Duemilanove: Piny 4 (SDA) i 5 (SCL) z grupy "ANALOG IN", piny 3V3 i GND z grupy "POWER"
- Arduino UNO: Piny 4 (SDA) i 5 (SCL) z grupy "ANALOG IN", piny 3V3 i GND z grupy "POWER"
- Arduino UNO R3: SDA, SCL w lewym górnym rogu, piny 3.3V i GND z grupy "POWER"
- Arduino MEGA: piny 20 (SDA), 21 (SCL) z grupy pinów "COMMUNICATION", piny 3.3V i GND z grupy pinów "POWER".
Czujnik wymaga podłączenia przez konwerter poziomów logicznych.
Przykładowe podłączenie do Arduino UNO R3:
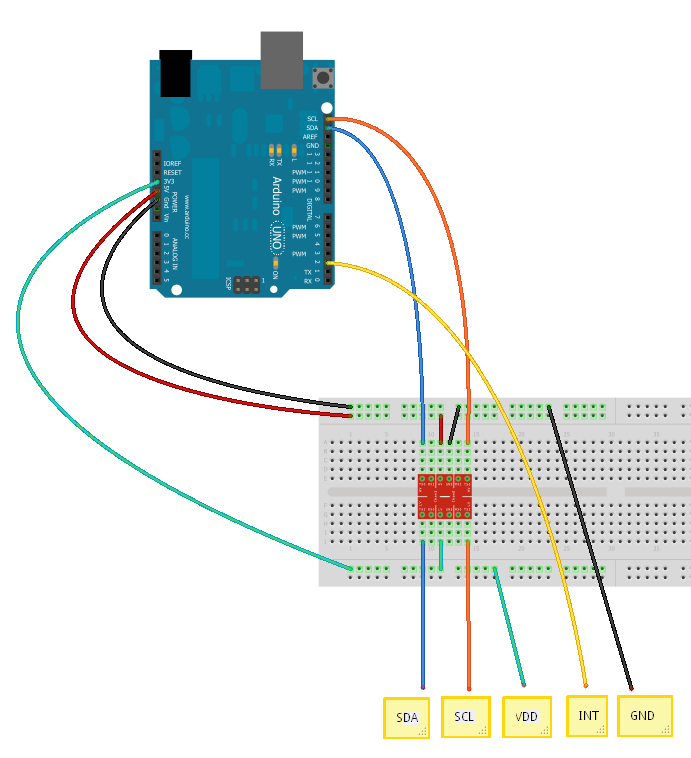
Czujnik podłączyłem przez konwerter poziomów logicznych. Żółte etykiety wskazują nazwy sygnałów na płytce czujnika do których trzeba podłączyć przewody. "VDD" należy podłączyć też do "VIO".
Program testowy:
Do czujnika MPU 6050 jest gotowa biblioteka stworzona przez Jeff-a Rowberg. Zawera ona 2 przykłady. "MPU6050raw" odczytuje dane z czujników układu, natomiast "MPU6050DMP6" używa do odczytu danych wbudowany w układ Digital Motion Processor, który automatycznie przetwarza dane z czujników na różne systemy położenia względem ziemi. Biblioteka dla Arduino do obsługi MPU 6050
Linki:
Ostatnio dodane
Więcej...Kategorie
Dostawcy
Gwarancja
Wszystkie zakupy na Nettigo są chronione 14-sto dniowym prawem do zwrotu. Bez zbędnych pytań.
Szczegółowe informacje o dostawie i zwrotachNewsletter
Raz, góra dwa razy w miesiącu możesz otrzymać newsletter o nowościach w naszej ofercie, promocjach, a także porcję wiadomości ze świata DIY i Arduino.