
Ostatnio dodane
Więcej...








Kategorie
Dostawcy
Gwarancja
Wszystkie zakupy na Nettigo są chronione 14-sto dniowym prawem do zwrotu. Bez zbędnych pytań.
Szczegółowe informacje o dostawie i zwrotachNewsletter
Raz, góra dwa razy w miesiącu możesz otrzymać newsletter o nowościach w naszej ofercie, promocjach, a także porcję wiadomości ze świata DIY i Arduino.
Arduino Motor Shield R3
Kod:
ard-motor-shield-r3
Waga:

44
g
Dostawca:
Płytka rozszerzeniowa Arduino do sterowania silnikami elektrycznymi.
Produkt wycofany ze sprzedaży
Płytka rozszerzająca możliwości Arduino o sterowanie 2 silnikami elektrycznymi prądu stałego (regulacja szybkości i kierunku). Moduł potrafi odczytać natężenie prądu silników. Dzięki temu można zapobiec przeciążeniu układu i rozpędzać nawet mocno obciążone maszyny. Ma też 2 złącza do urządzeń z magistralą I2C (TWI), oraz 2 złącza wejść analogowych i 2 złącza wyjść PWM. Złącza są kompatybilne z zestawami TinkerKit
Parametry techniczne:
- Napięcie zasilania: od 5 do 12 V przy zwartej zworce Vin
- Prąd zasilania: maksymalnie 4 A
- Maksymalny prąd pojedynczego silnika: 2 A
- Napięcie zasilania silnika: Zależne od napięcia zasilania płytki
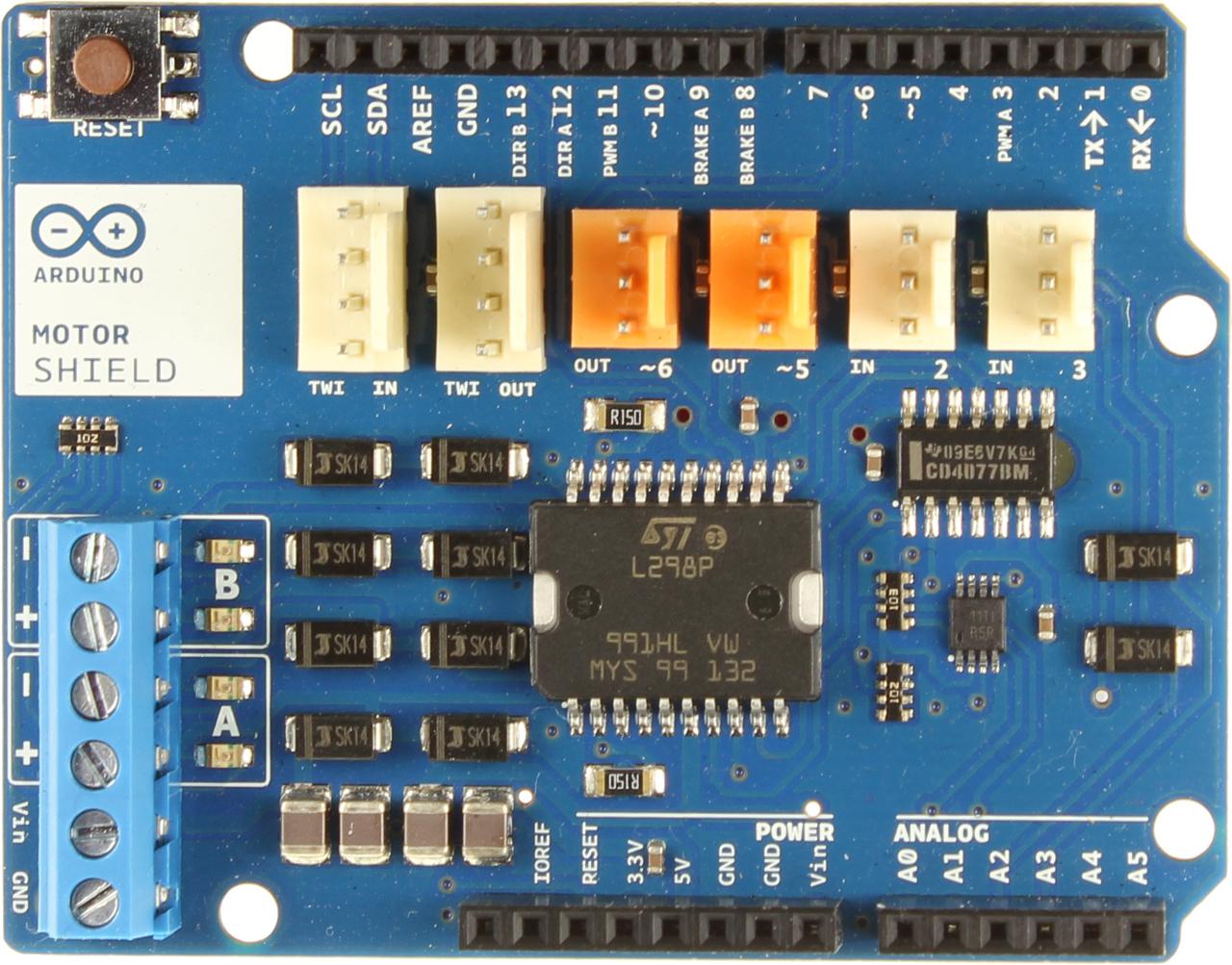
Opis wyprowadzeń:
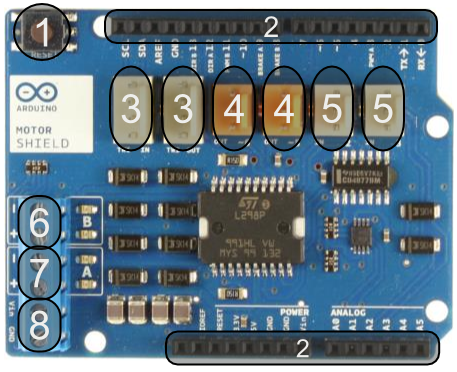
- 1 - Przycisk RESET zeruje stan Arduino i uruchamia program od nowa
- 2 - Standardowe złącza Arduino
- 3 - Wyjścia magistrali I2C (TWI)
- 4 - Wyjścia PWM z cyfrowych pinów Arduino 6 i 5
- 5 - Wejścia analogowe z analogowych pinów Arduino 2 i 3
- 6 - Wyjście zasilania silnika B
- 7 - Wyjście zasilania silnika A
- 8 - Wejście zewnętrznego zasilania
[3] Wyjścia magistrali I2C (TWI) mają piny (od góry)
- SCL: Wyjście zegarowe magistrali TWI
- SDA: Wyjście danych magistrali TWI
- +5V: Wyjście zasilania 5V
- GND: Wyjście masy GND
[4] Wyjścia cyfrowe/PWM
- +5V: Wyjście zasilania 5V
- OUT: Wyjście cyfrowego pinu PWM (6 lub 5)
- GND: Wyjście masy GND
[5] Wejścia analogowe
- +5V: Wyjście zasilania 5V
- IN: Wejście analogowego pinu (2 lub 3)
- GND: Wyjście masy GND
Przy wyjściach silników [6] i [7] płytka zawiera też 4 diody LED informujące o pracy i kierunku obrotów silników.
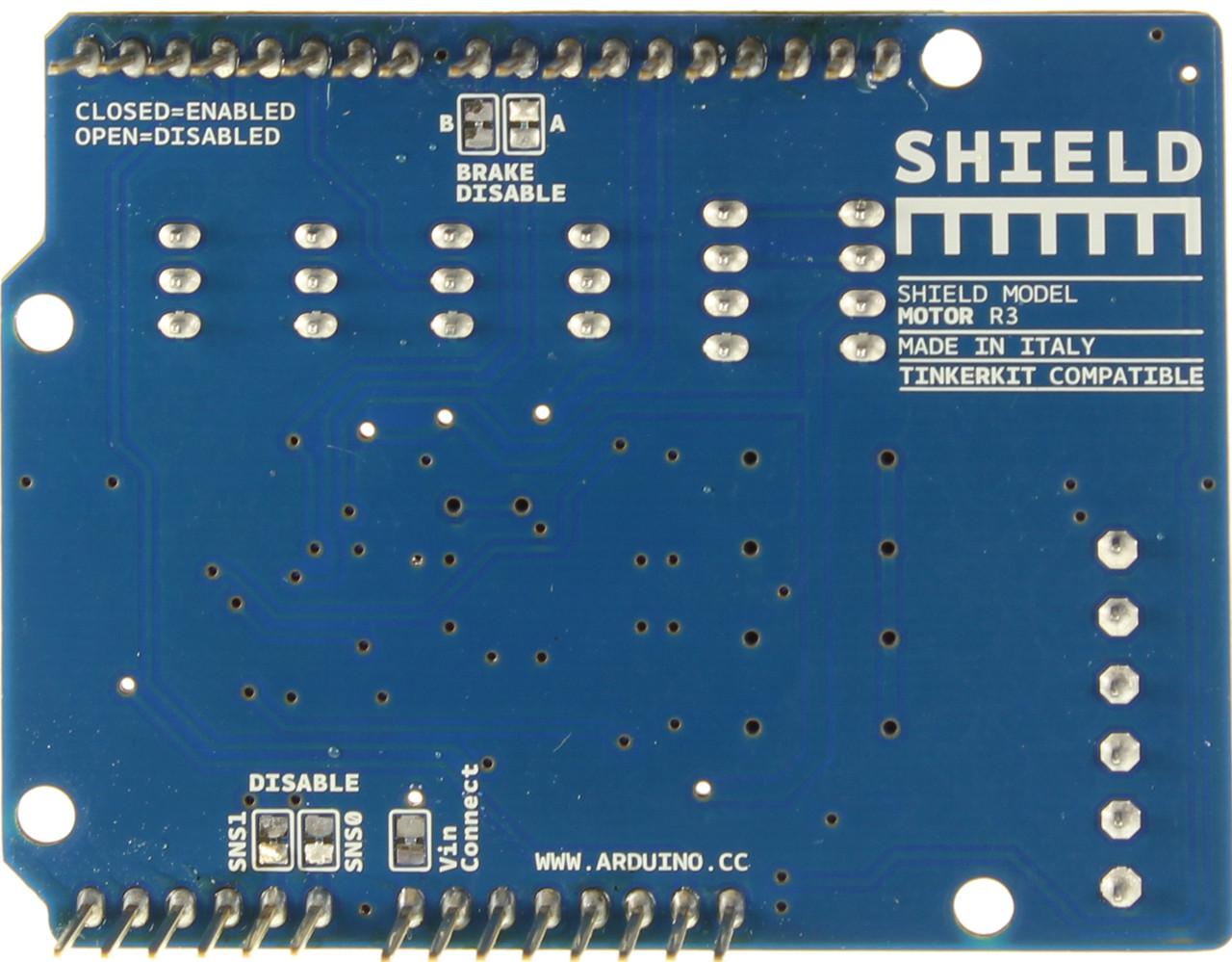
Opis zworek:
- BRAKE A - Zwarta włącza hamowanie silnika A pinem cyfrowym 8
- BRAKE B - Zwarta włącza hamowanie silnika B pinem cyfrowym 9
- SNS0 - Zwarta włącza pomiar prądu obciążenia silnika A przez Analog In 0 w Arduino
- SNS1 - Zwarta włącza pomiar prądu obciążenia silnika B przez Analog In 1 w Arduino
- Vin Connect - Zwarta powoduje, że wejście złącza zasilania [8] jest podłączone do pinu Vin Arduino. Jeśli zasilasz silniki napięciem od 5 do 12 V, zworka pozwala zasilać tym samym złączem również Arduino. Jeśli zasilasz silniki wyższym napięciem, zworka powinna być rozłączona i zasilanie Arduino powinno być osobne.
Podłączenie do Arduino:
Do sterowania silnikami płytka Motor Shield wykorzystuje piny cyfrowe 3, 8, 9, 11, 12, 13 i piny analogowe 0 i 1. Za pomocą zworek można odzyskać piny cyfrowe 8 (BREAK A), 9 (BREAK B) i analogowe 0 (SNS0) i 1 (SNS1). Dodatkowe złącza na płytce wykorzystują piny:
- TWI - SDA, SCL
- OUT ~6 - Cyfrowy pin PWM 6
- OUT ~5 - Cyfrowy pin PWM 5
- IN 2 - Analogowy pin 2
- IN 3 - Analogowy pin 3
Sterownie silnikiem A
- Cyfrowy pin 12 - Kierunek obrotów
- Cyfrowy pin PWM 3 - Siła/szybkość obrotów
- Cyfrowy pin 9 - Hamowanie silnika
- Analogowy pin 0 - Odczyt poboru prądu/obciążenia silnika
Sterownie silnikiem B
- Cyfrowy pin 13 - Kierunek obrotów
- Cyfrowy pin PWM 11 - Siła/szybkość obrotów
- Cyfrowy pin 8 - Hamowanie silnika
- Analogowy pin 1 - Odczyt poboru prądu/obciążenia silnika
Wyjście PWM reguluje zarówno prędkość obrotową jak i siłę hamowania silnika w zależności od ustawienia wyjścia hamulca.
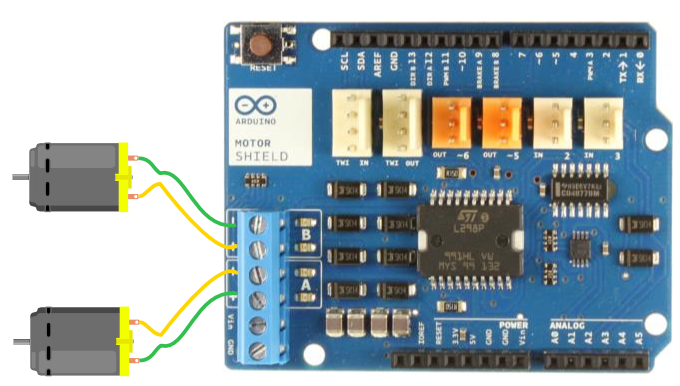
Przykładowe podłączenie do Arduino UNO R3:
Program testowy:
// Ustalenie numerów pinów #define DIRECTION 12 #define SPEED 3 #define BREAK 9 #define CURRENT 0 // Zmienna przechowująca kierunek obrotów byte dir = LOW; void setup() { // Ustawienie kierunku wyjść cyfrowych pinMode(DIRECTION, OUTPUT); pinMode(SPEED, OUTPUT); pinMode(BREAK, OUTPUT); // Włączenie hamulca digitalWrite(BREAK, HIGH); // Ustawienie kierunku digitalWrite(DIRECTION, dir); } void loop() { // Wyłączenie hamulca digitalWrite(BREAK, LOW); // Przyspieszanie silnika do maksymalnych obrotów // w ciągu 10 s for (byte speed=0; speed<=255; speed++) { analogWrite(SPEED, speed); delay(40); } // Hamowanie silnika w ciągu 3 s digitalWrite(BREAK, HIGH); delay(3000); // Ustawienie kierunku na odwrotny dir = ~dir; digitalWrite(DIRECTION, dir); }
Program rozpędza przez 10 s silnik "A" do maksymalnych obrotów, potem przez 3 s hamuje silnik, a następnie zmienia kierunek obrotów i powtarza cykl.
Linki:
Serwomechanizmy:







Silniki:









Sterowniki serwomechanizmów i silników:








Akcesoria do serwomechanizmów i silników:




Ostatnio dodane
Więcej...Kategorie
Dostawcy
Gwarancja
Wszystkie zakupy na Nettigo są chronione 14-sto dniowym prawem do zwrotu. Bez zbędnych pytań.
Szczegółowe informacje o dostawie i zwrotachNewsletter
Raz, góra dwa razy w miesiącu możesz otrzymać newsletter o nowościach w naszej ofercie, promocjach, a także porcję wiadomości ze świata DIY i Arduino.