
Ostatnio dodane
Więcej...








Kategorie
Dostawcy
Gwarancja
Wszystkie zakupy na Nettigo są chronione 14-sto dniowym prawem do zwrotu. Bez zbędnych pytań.
Szczegółowe informacje o dostawie i zwrotachNewsletter
Raz, góra dwa razy w miesiącu możesz otrzymać newsletter o nowościach w naszej ofercie, promocjach, a także porcję wiadomości ze świata DIY i Arduino.
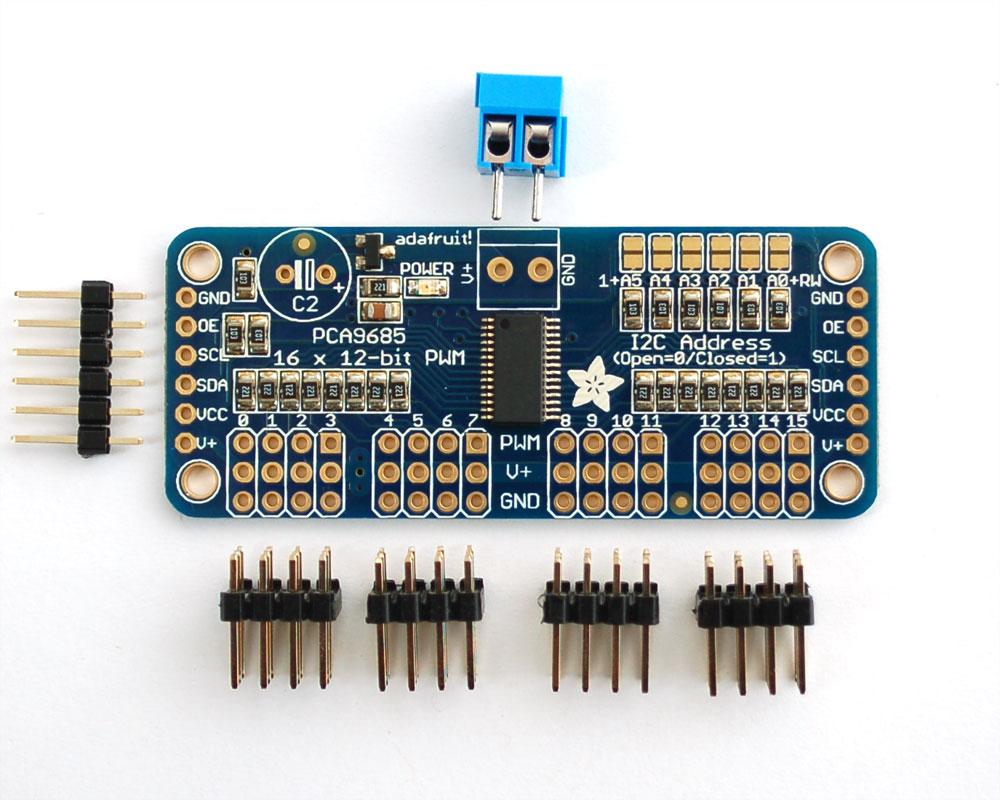
16-sto kanałowy sterownik serwomechanizmów z interfejsem i2c
Kod:
af-servo-driver
Waga:

11
g
Dostawca:
Steruj 16-ma serwomechanizmami za pomocą 2 przewodów magistrali i2c (TWI). Lub użyj jej jako 16-kanałowy generator PWM.
Produkt wycofany ze sprzedaży
Zastąpiony przez: Sterownik serwomechanizmów, 16 kanałów, I2C
Sugerowany następca
Sterownik serwomechanizmów, 16 kanałów, I2CModuł do sterowania 16 serwomechanizmami za pomocą magistrali i2c (TWI). Jest zbudowany na układzie PCA9685, który jest scalonym 16 kanałowym generatorem PWM o rozdzielczości 12 bitów (4096 stopni wypełnienia). Moduł posiada niewlutowane złącza typu goldpin do których można wpiąć bezpośrednio modelarskie wtyczki serwomechanizmów. Układ sterujący pracuje w standardach 3,3 i 5V zależnie od zasilania. Serwomechanizmy zasilane są niezależnie. Dzięki koonfiguracji adresu do jednej magistrali i2c możesz podłączyć do 62 modułów generatora uzyskując 992 wyjścia PWM lub sterowane serwomechanizmy.
Parametry techniczne:
- Wymiary: 62.5mm x 25.4mm x 3mm
- Waga: 5.5 g (z goldpinami 9 g)
- Napięcie zasilania: 2,3 do 5,5 V
- Standard stanów logicznych: 3,3 lub 5V zależnie od napięcia zasilania
- Niezależne zasilanie serwomechanizmów
- Generator PWM: PCA9685
- Częstotliwość taktowania generatorów: wewnętrzny oscylator 25 MHz +prescaler dzielący tą częstotliwość od 4 do 256 razy
- Rozdzielczość generatorów: 12 bitów (4096 stopni wypełnienia)
- Częstotliwośc pracy generatorów PWM: od 24 do 1526 Hz
- Interfejs komunikacyjny: Magistrala i2c (TWI) o taktowaniu 100 kHz, 400 kHz lub 1 Mhz
- Adres w magistrali i2c: od 64 do 127 ustawiany zworkami
Opis wyprowadzeń:
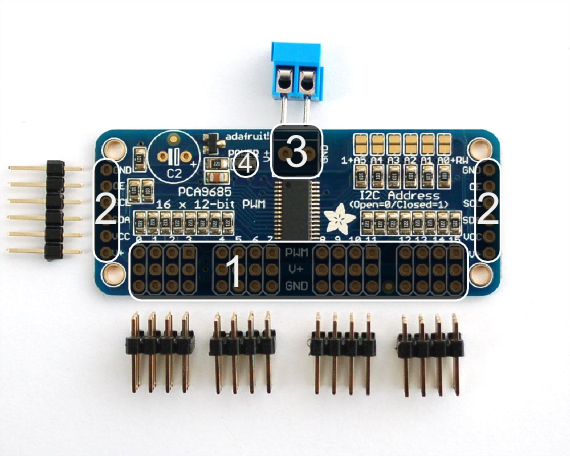
- 1 - Wyjścia do 16 serwomechanizmów
- 2 - Wyprowadzenia do podłaczenia kontrolera
- 3 - Złącze zasilania serwomechanizmów
- 4 - Dioda LED sygnalizująca zasilanie modułu
1 (od góry)
- PWM - Sygnał generatora
- V+ - Napięcie zasilania serwomechanizmów
- GND - Masa
2 (od góry)
- GND - Masa
- OE - Programowany sygnał aktywacji generatora
- SCL - Sygnał zegara magistrali i2c (TWI)
- SDA - Sygnał danych magistrali i2c (TWI)
- Vcc - Wejście zasilania generatora PWM (od 2,3 do 5.5 V)
- V+ - Zasilanie serwomechanizmów
3 (od lewej)
- V+ - Napięcie zasialania serwomechanizmów
- GND - Masa zasilania
Opis zworek:
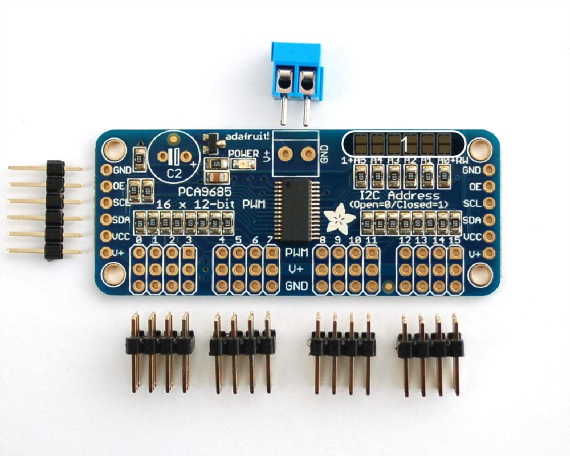
- 1 - 6 zworek ustalających adres generatora w magistrali i2c (TWI)
Adres generatora składa się z na stałę ustawionego 7 bitu adresu i konfigurowlnych pozostałych 6 bitów za pomocą zworek. Dzięki temu do jednej magistrali można podłączyć do 62 płytek i sterować 992 serwomechanizmami.
Podłączenie do Arduino:
- Arduino Duemilanove: Piny 4 (SDA) i 5 (SCL) z grupy "ANALOG IN", piny 5V i GND z grupy "POWER"
- Arduino UNO: Piny 4 (SDA) i 5 (SCL) z grupy "ANALOG IN", piny 5V i GND z grupy "POWER"
- Arduino UNO R3: SDA, SCL w lewym górnym rogu, piny 5V i GND z grupy "POWER"
- Arduino MEGA: piny 20 (SDA), 21 (SCL) z grupy pinów "COMMUNICATION", piny 5V i GND z grupy pinów "POWER".
- Arduino Leonardo: SDA, SCL w lewym górnym rogu, piny 5V i GND z grupy "POWER"
Przykładowe podłączenie do Arduino UNO R3:
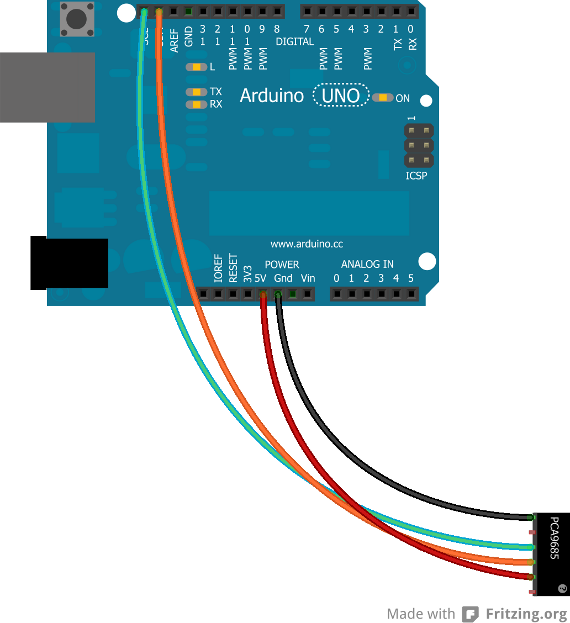
Schemat przedstawia podłączenie Arduino UNO R3 do prawej, albo lewej wtyczki modułu.
Program testowy:
// Biblioteki współpracujące z modułem #include <Wire.h> #include <Adafruit_PWMServoDriver.h> // Adres modułu (wszystkie zworki rozwarte) #define PCF_ADDRESS 0x40 // Tworzenie obiektu Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(PCF_ADDRESS); // Wartości dla generatora dla impulsu 1000 us i 2000 us // Czyli minimalny i maksymalny impuls dla serwomechanizmu #define SERVO_PULSE_MIN 250 #define SERVO_PULSE_MAX 500 // Funkcja zamieniająca kąt osi serwa od 0 do 180 stopni // na wartość sysyłaną do generatora PWM void servoWrite(byte servo, byte angle) { pwm.setPWM(servo, 0, map(angle, 0, 180, SERVO_PULSE_MIN, SERVO_PULSE_MAX)); } void setup() { // Uakktynienie generatora pwm.begin(); // Ustawieie częstotliwości PWM na 60 Hz pwm.setPWMFreq(60); } void loop() { // Ustawianie kolejny wyjść serwomechanizmów na każdy kąt for (byte servo=0; servo<16; servo++) { for (byte angle=0; angle<180; angle++) { servoWrite(servo, angle); delay(100); } } }
Program ustawia kolejne wyjścia serwomechanizmów na każdy kąt ich osi. Program ustawia generator PWM na 60 Hz "pwm.setPWMFreq(60);". Oznacza to, że licznik generatora PWM liczy od 0 do 4095 - 60 razy na sekundę.
Za pomocą "pwm.setPWM(output, begin, end);" można ustawić szerokość impulsu. Argument "output" to numer wyjścia od 0 do 15. "begin" to numer wartości licznika generatora przy której wyjście generatora zmienia się z LOW na HIGH. "end" to wartość licznika generatora, przy której wyjście generatora zmienia się z HIGH na LOW.
Linki:
Serwomechanizmy:







Silniki:









Sterowniki serwomechanizmów i silników:








Akcesoria do serwomechanizmów i silników:




Ostatnio dodane
Więcej...Kategorie
Dostawcy
Gwarancja
Wszystkie zakupy na Nettigo są chronione 14-sto dniowym prawem do zwrotu. Bez zbędnych pytań.
Szczegółowe informacje o dostawie i zwrotachNewsletter
Raz, góra dwa razy w miesiącu możesz otrzymać newsletter o nowościach w naszej ofercie, promocjach, a także porcję wiadomości ze świata DIY i Arduino.