
Ostatnio dodane
Więcej...








Kategorie
Dostawcy
Gwarancja
Wszystkie zakupy na Nettigo są chronione 14-sto dniowym prawem do zwrotu. Bez zbędnych pytań.
Szczegółowe informacje o dostawie i zwrotachNewsletter
Raz, góra dwa razy w miesiącu możesz otrzymać newsletter o nowościach w naszej ofercie, promocjach, a także porcję wiadomości ze świata DIY i Arduino.
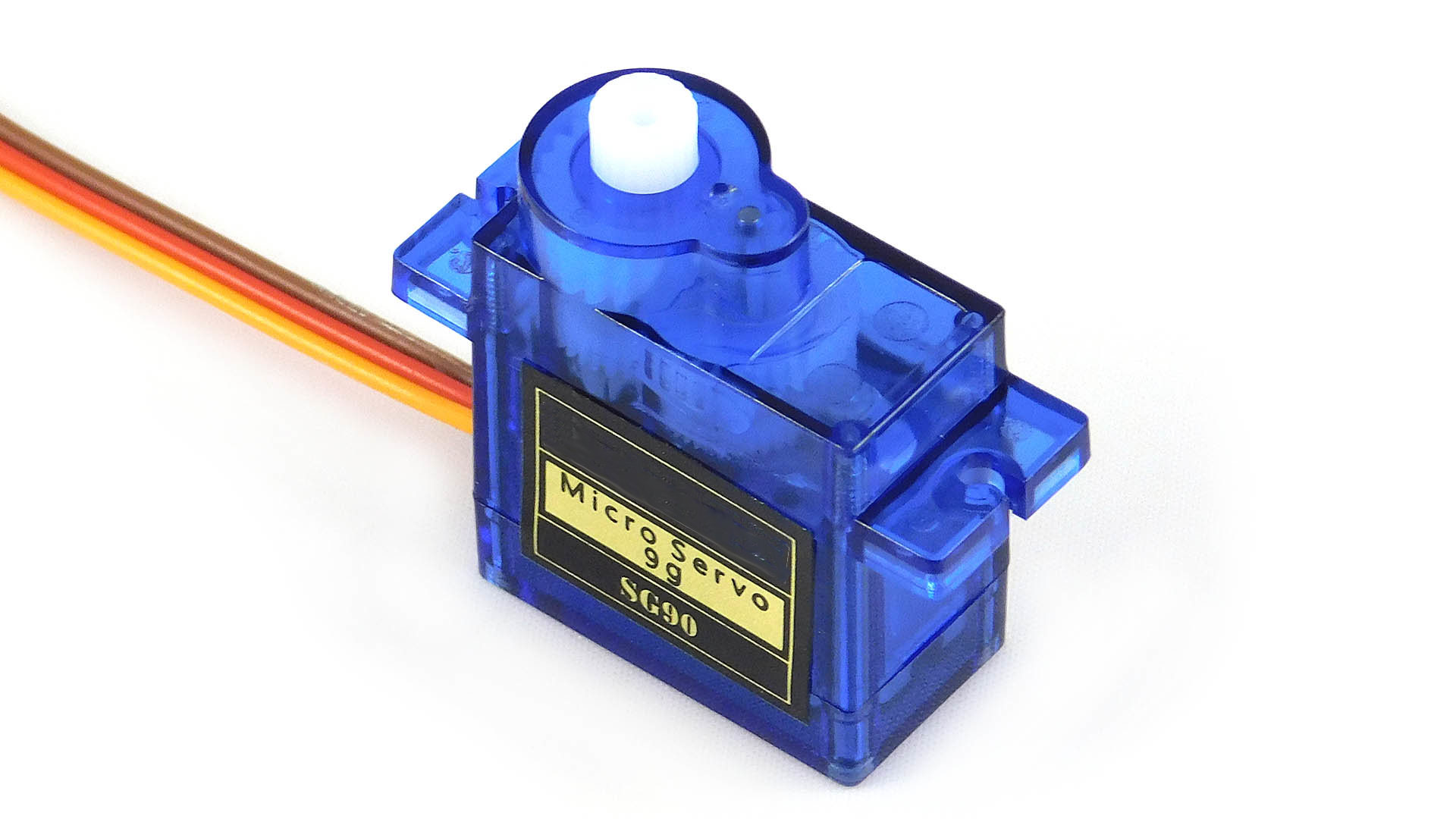


Serwomechanizm modelarski SG90
Kod:
ROB-75
Waga:

13
g
SG90 to serwomechanizm stosowany w modelarstwie. Zestaw zawiera komplet orczyków i śrubek pomagających zamocować elementy sterowane do osi serwomechanizmu.
W magazynie
73
PLN 9,00
PLN 7,32
bez VAT
| Ile sztuk? | Rabat | Cena za szt |
|---|---|---|
| 1 | 9,00 | |
| 5+ | 8,00 % | 8,28 |
| 10+ | 12,00 % | 7,92 |
| 25+ | 16,00 % | 7,56 |
| 100+ | 20,00 % | 7,21 |
| Rabaty ilościowe nie sumują się z innymi promocjami. Podano ceny brutto, obliczenia na podstawie cen netto. | ||
SG90 to serwomechanizm powszechnie stosowany w modelarstwie. Zestaw zawiera komplet orczyków i śrubek pomagających zamocować elementy sterowane do osi serwomechanizmu.
Jeżeli planujesz w swoim projekcie użyć większą ilość serwomechanizmów dobrym wyjściem będzie dedykowany 16-kanałowy sterownik z interfejsem I2C lub jego chiński tańszy odpowiednik.
Specyfikacja:
- Wymiary: 22 x 11.5 x 27 mm
- Waga: 9 g
- Zasilanie: od 3 do 6 V
- Pobór prądu: 550 mA
- Standard stanów logicznych: 3,3 V lub 5 V
- Sterowanie: PWM
- Zakres wypełnienia PWM: 500 - 2400 mikrosekund
- Szybkość: obrót o 60 stopni w 0.12 s
- Siła: 1,2 kg / cm ramienia przy zasilaniu 4.8V
Wyprowadzenia:
- brązowy przewód: GND (masa zasilania)
- czerwony przewód: Zasilanie 5 V
- pomarańczowy przewód: Sygnał sterujący PWM
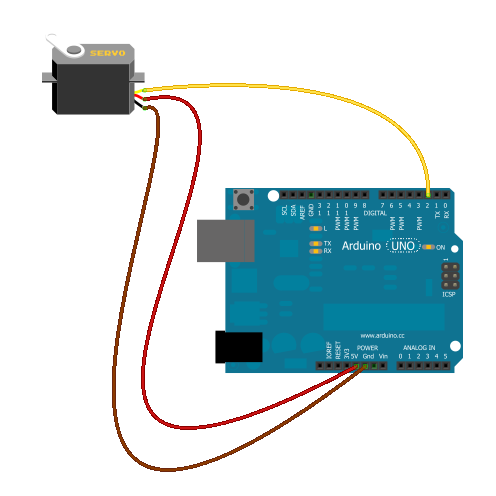
Podłączenie do Arduino:
Serwomechanizm wymaga podłączenia jednego dowolnego cyfrowego pinu z grupy “DIGITAL”, oraz zasilania GND i 5 V. Można to zrobić na przykład tak:
Przykładowy kod do sterowania serwomechanizmem korzystający z biblioteki Servo.h. Program testowy ustawia serwo w 3 różnych pozycjach. Minimalnej (kąt 0 stopni), środkowej (kąt 90 stopni) i maksymalnej (kąt 180 stopni).
#include <Servo.h> // Stworzenie obiektu serwomechanizmu Servo sg90; void setup() { // Ustawienie pinu do ktorego podlaczone jest serwo sg90.attach(2); } void loop() { // ustawienie osi na minimalny kat sg90.writeMicroseconds(450); // oczekiwanie pol sekundy delay(500); // ustawieie osi na srodkowy kat sg90.writeMicroseconds(1450); delay(500); // ustawienie osi na maksymalny kat sg90.writeMicroseconds(2450); delay(500); sg90.writeMicroseconds(1450); delay(500); }
Linki:
- Opis biblioteki "Servo.h"
- Nakładka na Arduino do sterowania silnikami i sewomechanizmami
- Opis przeróbki serwomechanizmu na silnik
- Opis działania sygnału PWM
- Jak zrobić dodatkowe kanały PWM
Serwomechanizmy:







Silniki:









Sterowniki serwomechanizmów i silników:








Akcesoria do serwomechanizmów i silników:




Ostatnio dodane
Więcej...Kategorie
Dostawcy
Gwarancja
Wszystkie zakupy na Nettigo są chronione 14-sto dniowym prawem do zwrotu. Bez zbędnych pytań.
Szczegółowe informacje o dostawie i zwrotachNewsletter
Raz, góra dwa razy w miesiącu możesz otrzymać newsletter o nowościach w naszej ofercie, promocjach, a także porcję wiadomości ze świata DIY i Arduino.